
CBSE Class 11 Physics • Chapter 13
Chapter Overview
This chapter covers the fundamental concepts of Oscillations. Ensure you understand the definitions and derivations thoroughly.
Examples of Periodic Motion (a) Insect climbing wall (b) Child climbing step (c) Ball bouncing.
Periodic Functions:
Mathematical functions that repeat their values at regular intervals.
$f(t) = f(t + T)$.
Examples: $\sin \omega t$ and $\cos \omega t$ are the simplest periodic functions with period $T = 2\pi/\omega$.
Any periodic function can be expressed as a superposition of sine and cosine functions (Fourier Theorem).
NCERT Focus: Identifying Motion Types (Example 13.3)
Q: Which functions represent Periodic or SHM?
Q1: Check if $\sin^2 \omega t$ represents periodic motion. If yes, find its period.
Ans: $\sin^2 \omega t = \frac{1 - \cos 2\omega t}{2}$. It involves $\cos 2\omega t$,
which is periodic.
Angular frequency is $2\omega$.
Period $T' = \frac{2\pi}{2\omega} = \frac{\pi}{\omega} = \frac{T}{2}$. Yes, it is periodic.
Q2: A human heart beats 75 times in a minute. Calculate its frequency and period.
Ans: Frequency $f = \frac{75}{60} = 1.25 \text{ Hz}$.
Period $T = \frac{1}{f} = \frac{1}{1.25} = 0.8 \text{ s}$.
Definition: SHM is the simplest form of oscillatory motion where the restoring force is directly proportional to the displacement from the mean position and acts always towards the mean position.
Where $k$ is the Force Constant (or Spring Constant). Unit: N/m.
Types of SHM:
Differential Equation of SHM:
From Newton's 2nd Law: $F = ma = m \frac{d^2x}{dt^2}$.
$m \frac{d^2x}{dt^2} = -kx \Rightarrow \frac{d^2x}{dt^2} + \frac{k}{m}x = 0$
Putting $\frac{k}{m} = \omega^2$, we get:
Displacement Equation: The solution to the above DE is:
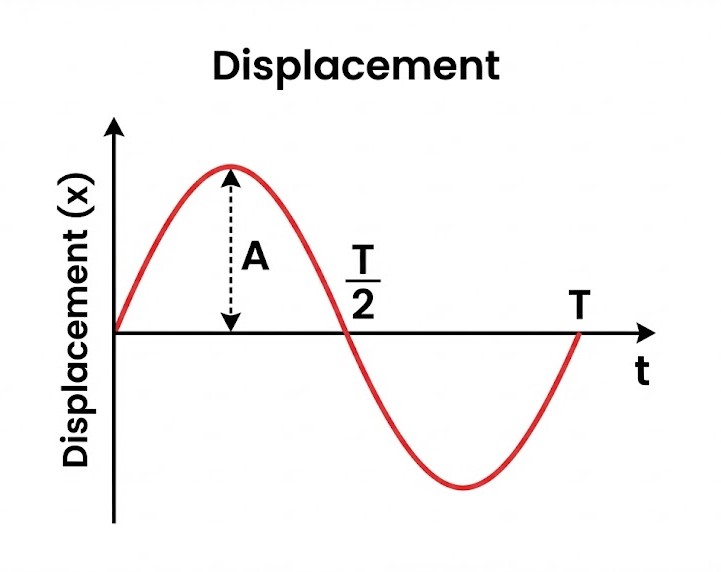
Displacement-Time Graph $x(t)$ for Simple Harmonic Motion.
Circular motion of a ball in a glass bowl (Analogy for SHM).
Reference Circle Method:
Simple Harmonic Motion can be visualized as the projection of Uniform Circular Motion on a diameter of the reference circle.
Reference Circle Method (P rotates, M oscillates).
Coordinates of Projection M:
$x = A \cos(\omega t + \phi)$
Velocity of M: x-component of P's velocity (tangential $v=A\omega$).
$v(t) = -A\omega \sin(\omega t + \phi)$
Acceleration of M: x-component of P's acceleration (centripetal $a_c=\omega^2 A$).
$a(t) = -\omega^2 A \cos(\omega t + \phi) = -\omega^2 x$.
Q1: Which of the following functions of time represent (a) Simple Harmonic, (b) Periodic but not SHM, and (c) Non-periodic motion?
Ans: (i) SHM ($T=2\pi/\omega$), (ii) Periodic ($T=2\pi/\omega$), (iii) SHM ($T=\pi/\omega$), (iv) Periodic ($T=2\pi/\omega$), (v) Non-periodic.
Q2: A particle executes SHM given by $x = 5 \cos(2\pi t + \pi/4)$ in SI units. Find: amplitude, frequency, and initial phase.
Ans: Comparing with $A \cos(\omega t + \phi)$:
$A = 5 \text{ m}$
$\omega = 2\pi \Rightarrow f = 1 \text{ Hz}$
$\phi = \pi/4 \text{ rad}$.
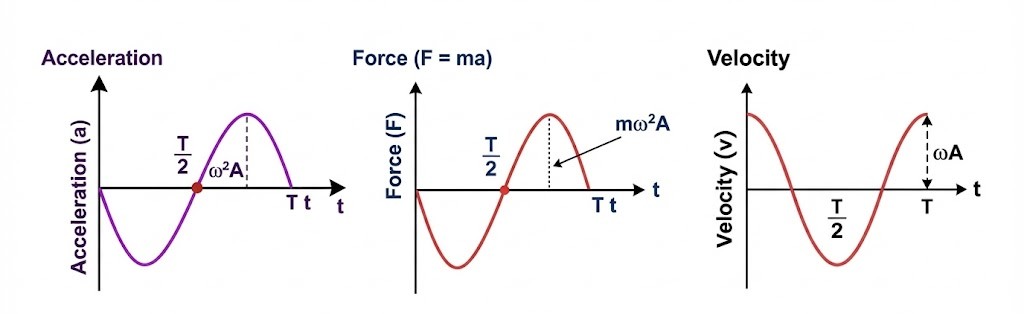
Variation of Velocity, Acceleration, and Force with Time.
1. Velocity ($v$): Rate of change of displacement.
$v = \frac{dx}{dt} = \frac{d}{dt}[A \cos(\omega t + \phi)] = -A\omega \sin(\omega t + \phi)$
Relation with $x$: Using $\sin^2\theta + \cos^2\theta = 1$
2. Acceleration ($a$): Rate of change of velocity.
$a = \frac{dv}{dt} = \frac{d}{dt}[-A\omega \sin(\omega t + \phi)] = -A\omega^2 \cos(\omega t + \phi)$
Q1 (CBSE): A particle executes SHM with amplitude $A$. At what distance from the mean position is its speed half of its maximum speed?
Ans: $v = \omega \sqrt{A^2 - x^2}$ and $v_{max} = \omega A$.
Given $v = v_{max}/2 \Rightarrow \omega \sqrt{A^2 - x^2} = \frac{\omega A}{2}$.
Squaring both sides: $A^2 - x^2 = A^2/4 \Rightarrow x^2 = 3A^2/4$.
$x = \pm \frac{\sqrt{3}}{2} A$.
Q2: Maximum velocity of a particle in SHM is $\alpha$ and maximum acceleration is $\beta$. Find the time period and amplitude.
Ans: $v_{max} = \omega A = \alpha$ ... (1)
$a_{max} = \omega^2 A = \beta$ ... (2)
Divide (2) by (1): $\omega = \beta/\alpha$.
$T = 2\pi/\omega = 2\pi \alpha / \beta$.
From (1): $A = \alpha / \omega = \alpha / (\beta/\alpha) = \alpha^2 / \beta$.
Linear Simple Harmonic Oscillator: A system oscillating under a restoring force $F = -kx$.
Time Period: $T = 2\pi \sqrt{\frac{m}{k}}$.
Frequency: $\nu = \frac{1}{2\pi} \sqrt{\frac{k}{m}}$.
(a) Block attached to spring (displaced). (b) Displacement-time graph.
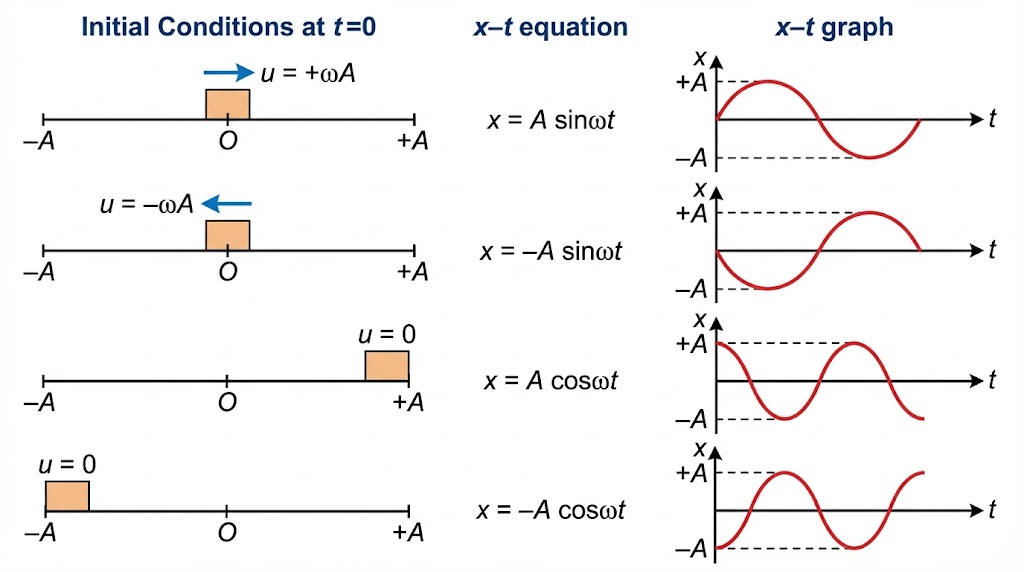
Initial Conditions determining $x(t)$ equation and graph.
Vertical Oscillations of a Spring:
Figure: Vertical Spring System in Unstretched, Equilibrium, and Displaced states.
Equilibrium Position: Weight balances spring force.
$k l_0 = mg$ (where $l_0$ is extension at equilibrium).
Displaced Position: Pulled down by distance $y$.
Total extension = $l_0 + y$.
Restoring Force $F = mg - k(l_0 + y)$.
$F = mg - k l_0 - ky$. (Since $mg = k l_0$).
$F = -ky$.
This is SHM condition. Thus, Time Period is same as horizontal spring:
Combinations of Springs:
1. Springs in Parallel: (Both springs pulled by deduction)
Figure: Springs in Parallel (Side-by-side).
If two springs $k_1$ and $k_2$ are connected such that extension ($x$) is same for both.
$F_{total} = F_1 + F_2 = -(k_1 x) - (k_2 x) = -(k_1 + k_2)x$.
$T_{par} = 2\pi \sqrt{\frac{m}{k_1 + k_2}}$.
2. Springs in Series: (End to end)
Figure: Springs in Series (End-to-End).
Force $F$ is same in both springs. Extensions are $x_1$ and $x_2$. Total extension $x = x_1 + x_2$.
$x_1 = -F/k_1$, $x_2 = -F/k_2$.
$x = -F(\frac{1}{k_1} + \frac{1}{k_2})$. Also $x = -F/k_{eq}$.
$T_{ser} = 2\pi \sqrt{m(\frac{1}{k_1} + \frac{1}{k_2})} = 2\pi \sqrt{\frac{m(k_1+k_2)}{k_1 k_2}}$.
Q1: Two identical springs of spring constant $k$ are attached to a block of mass $m$ and to fixed supports as shown. (a) Series (b) Parallel. Find the ratio of their Time Periods.
Ans: (a) Series: $k_{eq} = k/2$. $T_s = 2\pi \sqrt{2m/k}$.
(b) Parallel: $k_{eq} = 2k$. $T_p = 2\pi \sqrt{m/2k}$.
Ratio $T_s / T_p = \sqrt{2}/\sqrt{1/2} = \sqrt{4} = 2:1$.
Q2: A spring with force constant $k$ is cut into two equal halves. What is the spring constant of each half?
Ans: Spring constant is inversely proportional to length ($k \propto 1/L$).
If length becomes $L/2$, force constant becomes $2k$. So, each half has stiffness $2k$.
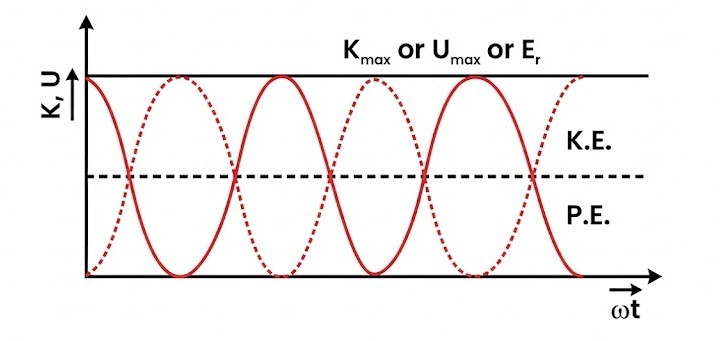
Combined Plot of Kinetic, Potential, and Total Energy.
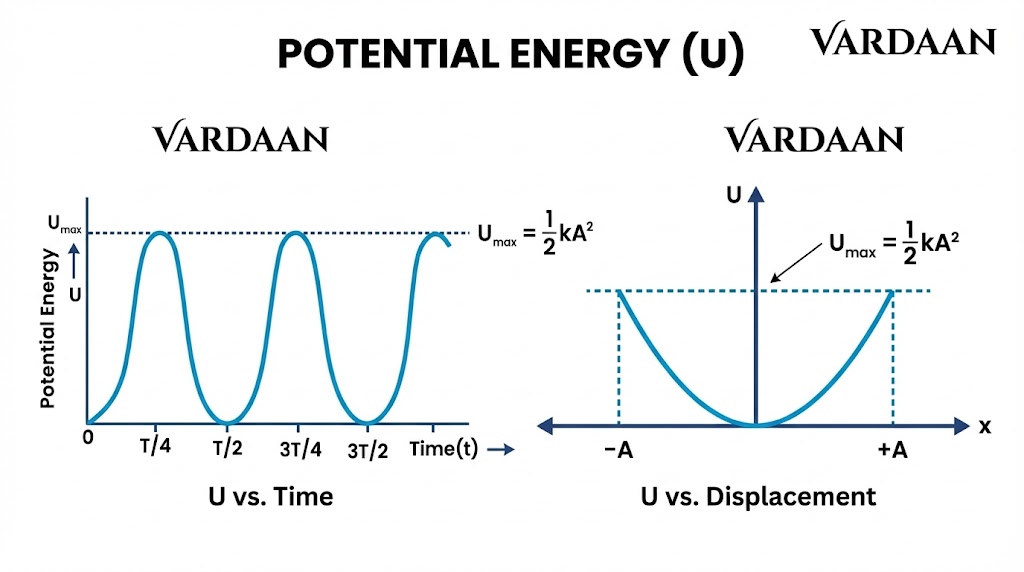
1. Potential Energy ($U$): Work done against restoring force $F = -kx$.
$dW = -F dx = -(-kx)dx = kx dx$.
$U = \int_0^x kx' dx' = \frac{1}{2} k x^2$.
Using $x = A \cos(\omega t + \phi)$:
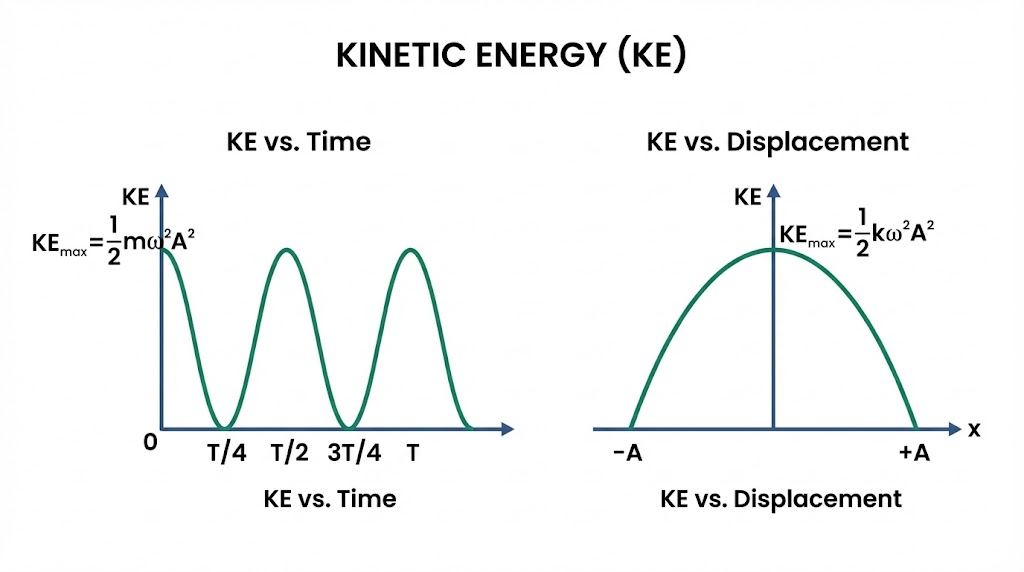
2. Kinetic Energy ($K$): $K = \frac{1}{2} m v^2$.
Using $v = -A\omega \sin(\omega t + \phi)$:
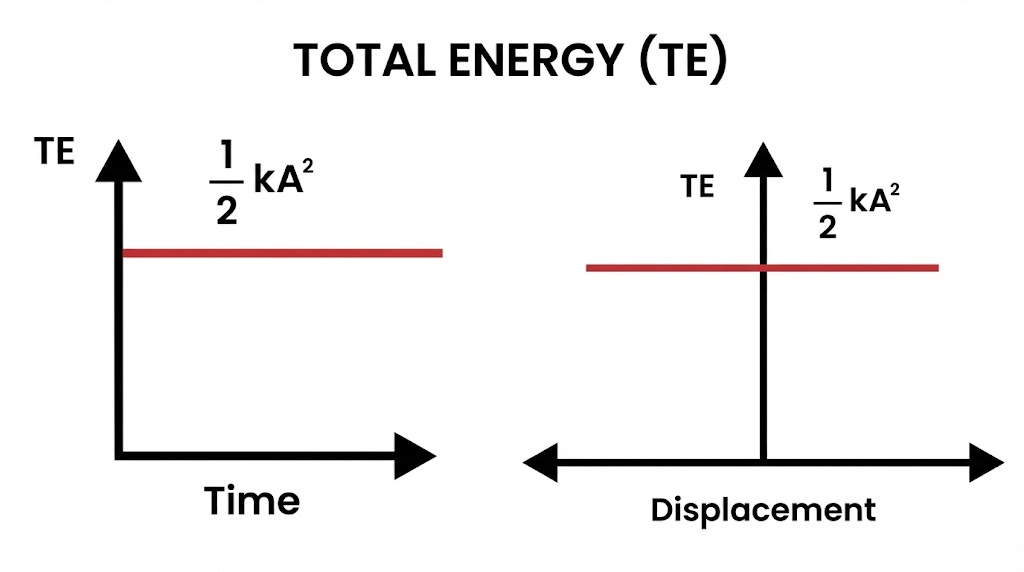
3. Total Mechanical Energy ($E$):
$E = K + U = \frac{1}{2} m \omega^2 A^2 (\sin^2 \theta + \cos^2 \theta)$.
At Mean Position ($x=0$): $U=0, K=E$. At Extreme ($x=\pm A$): $U=E, K=0$.
Q1: At what position from the mean is the Potential Energy equal to half the Total Energy?
Ans: $U = E/2 \Rightarrow \frac{1}{2} k x^2 = \frac{1}{2} (\frac{1}{2} k A^2)$.
$x^2 = A^2/2 \Rightarrow x = \pm A/\sqrt{2}$.
Q2: Plot the graph of Potential Energy and Kinetic Energy with respect to time for one complete oscillation.
Hint: Use the graph provided in figure. Note that PE is max at extremes (t=T/4, 3T/4) and KE is max at mean (t=0, T/2, T).
Forces acting on a Simple Pendulum
Derivation:
1. Forces acting on bob: Tension $T$ (along string) and Weight $mg$ (downwards).
2. Resolve $mg$: along string ($mg \cos\theta$) and perpendicular ($mg \sin\theta$).
3. Restoring force acts towards mean position: $F_{res} = -mg \sin\theta$.
4. For small angles ($\theta < 10^\circ$), $\sin\theta \approx \theta$ (in radians). And $\theta=\frac{\text{arc}}{\text{radius}}=\frac{x}{L}$.
5. $F_{res} = -mg \frac{x}{L}$.
6. Comparing with $F = -kx$, we get effective spring constant $k_{eff} = \frac{mg}{L}$.
Time Period:
$T = 2\pi \sqrt{\frac{m}{k_{eff}}} = 2\pi \sqrt{\frac{m}{mg/L}}$
Simple Pendulum showing Equilibrium and Extreme Positions.
A rigid body oscillating about a horizontal axis passing through it at some distance from the center of mass.
Time Period:
Q1: A simple pendulum has a time period $T_1$ on Earth ($g=9.8$). It is taken to the Moon where $g_{moon} = g/6$. What is the new time period?
Ans: $T \propto 1/\sqrt{g}$.
$T_{moon}/T_{earth} = \sqrt{g_{earth} / g_{moon}} = \sqrt{g / (g/6)} = \sqrt{6}$.
$T_{moon} = \sqrt{6} T_1 \approx 2.45 T_1$.
Q2: What is the length of a "Seconds Pendulum" ($T=2s$) on Earth?
Ans: $T = 2\pi \sqrt{L/g} \Rightarrow T^2 = 4\pi^2 L/g$.
$L = g T^2 / 4\pi^2 = (9.8 \times 4) / (4 \times 9.86) \approx 0.993 \approx 1 \text{ meter}$.
Q3: A pendulum is suspended in a lift moving up with acceleration $a$. How does the Time Period change?
Ans: Effective gravity becomes $g_{eff} = g + a$.
$T = 2\pi \sqrt{L / (g+a)}$. The time period decreases (oscillates faster).
1. Free Oscillation: Oscillation under internal restoring force only. Amplitude remains constant (Undamped).
2. Damped Oscillation: Amplitude decreases with time due to resistive forces.
Equation: $m \frac{d^2x}{dt^2} + b \frac{dx}{dt} + kx = 0$ ($b$ is damping constant).
Amplitude Decay: $A(t) = A_0 e^{-bt/2m}$.
Types of Damping:
Figure: Damped Harmonic Motion (Amplitude decays exponentially).
3. Forced Oscillation: Driven by external periodic force $F(t) = F_0 \cos(\omega_d t)$.
Equation of Motion:
Resonance: When driving frequency matches natural frequency ($\omega_d \approx \omega_n$).
Amplitude becomes maximum: $A_{max} \approx \frac{F_0}{b\omega}$. Sharp resonance occurs for small damping $b$.
Figure: Resonance Curve showing variation of Amplitude with Driving Frequency.
Resonance Curve
Q1: What is the effect of damping on the amplitude and frequency of an oscillator?
Ans: Amplitude decreases exponentially with time: $A(t) = A_0 e^{-bt/2m}$.
Frequency decreases slightly: $\omega' = \sqrt{k/m - (b/2m)^2}$.
Q2: Distinguish between Free, Force, and Resonant Oscillations.
Ans:
(1) Free: Vibrates with natural frequency, no external force.
(2) Forced: Driven by external periodic force, vibrates with frequency of driver.
(3) Resonance: Special case of forced oscillation where Driver Frequency = Natural Frequency. Amplitude
is
maximum.
Q: A body oscillates with SHM according to the equation $x = 5 \cos(2\pi t + \pi/4)$. Find (a) Amplitude, (b) Time Period, (c) Initial Phase.
Sol: Compare with $x = A \cos(\omega t + \phi)$.
(a) $A = 5 \text{ m}$ (assuming SI).
(b) $\omega = 2\pi$. Since $\omega = 2\pi/T \Rightarrow 2\pi/T = 2\pi \Rightarrow T = 1 \text{ s}$.
(c) Initial Phase $\phi = \pi/4$ rad.
Q: A mass of 2kg is attached to a spring of constant $k = 200 \text{ N/m}$. Calculate the frequency of oscillation.
Sol: $m = 2 \text{ kg}$, $k = 200 \text{ N/m}$.
$\nu = \frac{1}{2\pi} \sqrt{\frac{k}{m}} = \frac{1}{2\pi} \sqrt{\frac{200}{2}} = \frac{1}{2\pi} \sqrt{100} = \frac{10}{2\pi} \approx 1.59 \text{ Hz}$.
Q: The length of a simple pendulum is increased by 44%. What is the percentage increase in its time period?
Sol: $T \propto \sqrt{L}$. Let initial length be $L$. New length $L' = L + 0.44L = 1.44L$.
$T' \propto \sqrt{1.44L} = 1.2 \sqrt{L} = 1.2 T$.
Increase $= T' - T = 0.2T$.
% Increase $= \frac{0.2T}{T} \times 100 = 20\%$.
Master Strategy: For SHM problems, always identify $\omega$ first. Most quantities ($v, a, T, K, U$) depend on $\omega$. Remember $\omega = \sqrt{k/m}$ for springs and $\omega = \sqrt{g/L}$ for pendulums.